Accurate estimation of Rider and Driver Location is a crucial requirement for reliable fulfillment of transport services.
To orchestrate a Trip, MOOVE needs to know the locations of the assigned Driver and the Riders, as well as provide navigation guidance from a Driver’s current location to where the next rider needs to be picked up, and then, to the destination. Accurate locations of Riders and Drivers are required for the system to work reliably.
Why is this a problem? Don’t the Android and iPhones return accurate locations (Latitude, Longitudes and Header)? The smartphone GPS work fairly well in open areas but the returned Locations estimates can be inaccurate in highly built-up urban areas. It is because GPS requires a direct line of sight between the receiver and the satellite. When an object such as a building or a tree lies within the direct path, accuracy suffers due to reflections and weakening of signals. When weak signals are received, they may have been reflected off buildings and the surrounding landscape. Reflections generate multi-path signals arriving with a small time delay at the receiver. This results in inaccurately calculated position.
{kind=link}
So what is Map Matching?
The GPS signals are noisy and sparse. They don’t care if they resolve to a location on a physical road, they can be close but may not represent the actual or true location of the vehicle. Map Matching is the process of taking raw GPS locations and matching + mapping them to an actual location on a physical road segment. Merely matching to the nearest road is prone to mistakes
The input to a Map Matching system are the device returned Latitude, Longitude, Speed and the Direction (Course). The output is a real or actual position on a road in terms of Latitude, Longitude, Road Segment ID and Direction (Heading).
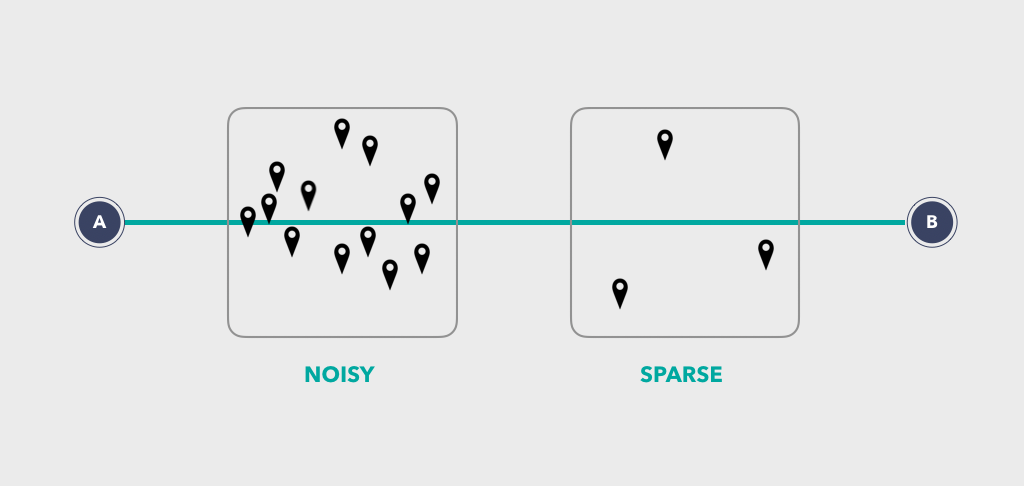
While there are many variations, the diagram below summarizes two of the most common scenarios – the Signal is either too noisy, or too sparse.
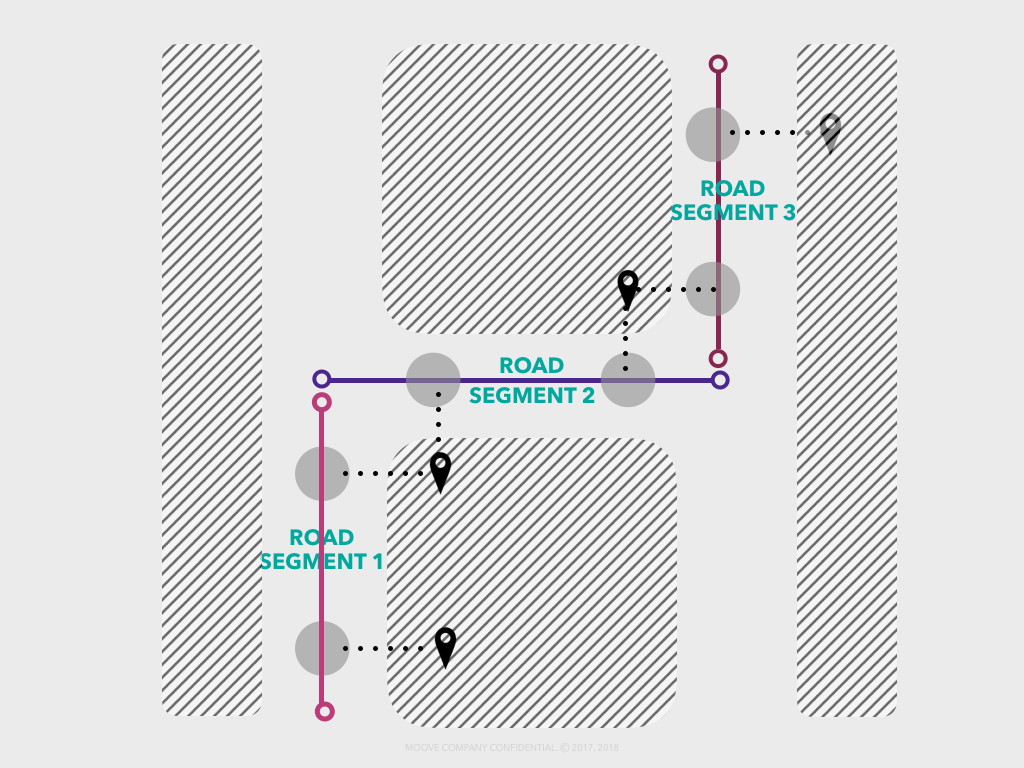
For example, the diagram below shows the 5 GPS positions received. Map matching determines the vehicle path that most likely resulted in these observations. Map Matching projects each observed signal to all the nearest road segments as the signal would have likely originated from one of those road segments. The projected locations are the hidden states that a map matching algorithm finds.
The output of Map Matching is the actual positions on the Road. It includes the actual Latitude, the actual Longitude, Road Segment ID, Road Name and the Direction + Heading. It guarantees that the output positions provided are present on a physical road. The Direction and Heading is also the actual direction that the vehicle took. In short, the map matching algorithm returns the most likely path mapped to actual roads that was taken based on the imprecise raw GPS signal.
The most efficient map matching algorithm is an implementation of a Hidden Markov Model by Paul Newson and John Krumm. This algorithm is available through by a Google API called Snap to Roads, and that is what is implemented in MOOVE’s Location Service.
Accurate Locations is also critical for computing actual distance traveled for fare calculation and billing purposes. This computation of actual distance using map matching is computed offline, based on stored trip data. It is implemented in MOOVE’s
Members: please use the Link(s) below to view these Services.
Don’t see the Link(s) above? Please Sign-in / Register as a Member.